




Hyrräkompassi aluksissa: rakentaminen, työskentely ja käyttö
hyrräkompassi on gyroskoopin muoto, jota käytetään laajalti aluksissa, joissa käytetään sähkökäyttöistä, nopeasti pyörivää gyroskooppipyörää ja kitkavoimia muiden tekijöiden ohella hyödyntäen fysiikan peruslakeja, painovoiman vaikutuksia ja maan pyörimistä todellisen pohjoisen löytämiseksi.
konstruktio

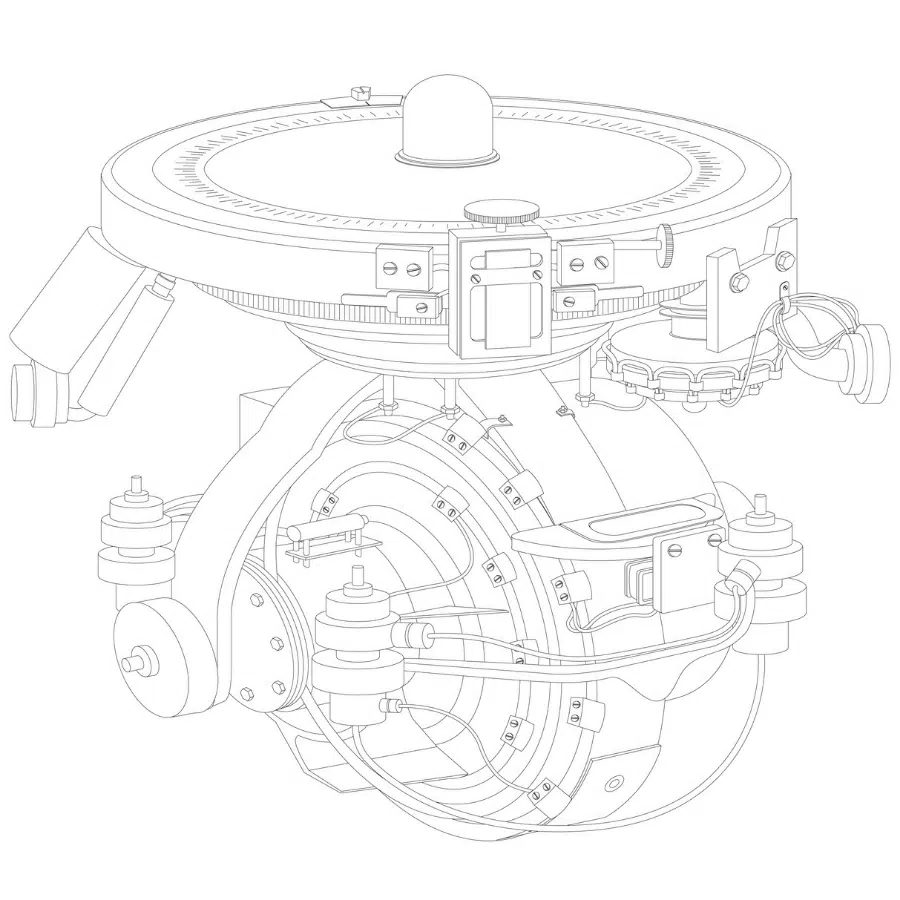
hyrräkompassi on tullut lähes kaikissa kauppalaivoissa tai merivoimissa yhdeksi välttämättömäksi välineeksi, koska se kykenee havaitsemaan todellisen pohjoisen suunnan eikä magneettista pohjoista. Se koostuu seuraavista yksiköistä:
- Master Compass: löytää ja ylläpitää true north reading avulla gyroskooppi.
- toistin kompassit: vastaanottaa ja osoittaa todellinen suunta lähetetään sähköisesti Pääkompassi.
- Kurssitallennin: tekee jatkuvan tallennuksen ohjailusta liikkuvalle paperinauhalle.
- Ohjauspaneeli: Ohjaa järjestelmän sähköistä toimintaa ja määrittää ajokunnon sopivan mittarin avulla.
- jännitteensäädin: ylläpitää aluksen jatkuvaa syöttöä moottorigeneraattoriin.
- hälytysyksikkö: ilmoittaa aluksen toimitushäiriön.
- vahvistin paneeli: ohjaa seurantajärjestelmä.
- Moottorigeneraattori: Muuntaa aluksen tasavirta-virran AC: ksi ja aktivoi Kompassilaitteet.
Hyrräkompassit liitetään toistinkompasseihin yhden siirtoverkon kautta. Kiinnitetty nopeasti pyörivä roottori painaa 1,25 paunasta 55 paunaan.
toinen sähkömoottori pyörittää sitä tuhansia kierroksia minuutissa. Hyrräkompassijärjestelmän olennaisin osa on kuitenkin spinning wheel, jota kutsutaan Gyroskoopiksi.
työskentely
normaaleja kompasseja vääristävät ulkoiset magneettikentät eivät voi vaikuttaa Hyrräkompasseihin. Kun alus muuttaa suuntaansa, itsenäisesti ohjattu kehys nimeltä ”Phantom” liikkuu sen mukana, mutta roottorijärjestelmä jatkaa kohti pohjoista.
tämän linjauksen puuttumisen ansiosta se voi lähettää signaalin ajomoottorille, joka siirtää phantom-askelman roottorijärjestelmän mukana uudelleen reitille, jossa phantom on saattanut kulkea vain asteen tai useamman asteen murto-osan kompassiympyrästä.
heti kun ne ovat linjassa, phantom lähettää sähköimpulsseja toistinkompasseihin jokaiselle asteelle, jonka se kulkee.
gyroskoopin gyroskooppi on asennettu siten, että se voi liikkua vapaasti kolmen toisiinsa nähden kohtisuorassa olevan akselin ympäri, ja sitä ohjataan siten, että sen pyörimisakseli asettuu samansuuntaiseksi todellisen pituuspiirin kanssa maan pyörimisen ja painovoiman vaikutuksesta.
Gyrocompass – järjestelmän sovellukset perustuvat kahteen perusominaisuuteen, jotka ovat:
- gyroskooppinen Inertia: minkä tahansa pyörivän kappaleen taipumus ylläpitää pyörimistasoaan.
- Prekessio: ominaisuus, joka aiheuttaa gyroskoopin liikkua, kun pari on sovellettu. Mutta sen sijaan, että se liikkuisi parin suuntaan, se liikkuu suorassa kulmassa levitetyn parin akseliin ja myös pyörivään pyörään nähden.
nämä kaksi ominaisuutta ja maapallon kahden luonnonvoiman, pyörimisen ja painovoiman, hyödyntäminen saavat Gyrokompassin hakeutumaan todelliseen pohjoiseen.
kun roottori on asettunut todelliselle pituuspiirille, se pysyy siellä loputtomasti niin kauan kuin aluksen sähkönsyöttö pysyy vakiona ja muuttumattomana ja ulkoisten voimien vaikuttamattomana.
käyttö-ja Virhekaavio
Hyrräkompasseja käytetään ennen kaikkea useimmissa aluksissa todellisen pohjoisen havaitsemiseen, ohjaamiseen sekä asemien etsimiseen ja kurssien tallentamiseen.
, mutta aluksen kurssin, nopeuden ja leveyden vuoksi saattoi esiintyä joitakin höyrytysvirheitä. On havaittu, että pohjoisilla kursseilla hyrräkompassi pohjoiseen on hieman taipunut länteen todellisesta pituuspiiristä, kun taas eteläisillä kursseilla se on taipunut itään.
nykyaikaiset alukset käyttävät GPS-järjestelmää tai muuta navigointivälinettä syöttääkseen tietoja gyrokompassiin virheen korjaamiseksi. Ortogonaalinen kolmikanta valokuitu suunnittelu ja myös rengas laser gyroskoopit, jotka soveltavat periaatteita optisen reitin ero määrittää pyörimisnopeus, sen sijaan, että riippuu mekaanisista osista, voi auttaa poistamaan puutteita ja havaita true north.
you may also like to read-Automatic Identification System (AIS) & the Importance of Vessel Tracking System
An Introduction to Fluxgate Compass
Disclaimer: Kirjoittajien tässä artikkelissa esittämät näkemykset eivät välttämättä vastaa Marine Insightin näkemyksiä. Artikkelissa mahdollisesti käytetyt tiedot ja kaaviot on hankittu saatavilla olevista tiedoista, eikä mikään lakisääteinen viranomainen ole vahvistanut niitä oikeiksi. Kirjailija ja Marine Insight eivät väitä sitä oikeaksi eivätkä ota vastuuta samasta. Näkemykset ovat vain mielipiteitä, eivätkä ne ole ohjeita tai suosituksia mistään toimintatavasta, jota lukijan tulisi noudattaa.