




シンプルなリモコン回路:無線回路を備えたDIYのおもちゃの車
シンプルなリモコン回路については、当然のことながら、すべての年齢の子供たちによ
しかし、既製のリモコン車に着陸すると高価になることがあります。 そして、今日の記事では、実際の回路図を使って、簡単なリモートコントロール車を作ることができる簡単な方法であなたを教育しようとしています。 私達が設計する車は無線周波数(RF)を作動させ、DIYに非常に容易です。 なお、それを使用する前に車をプログラムする必要はありません。 詳細については、リモート制御集積回路がどのように機能するかを示し、使用するモジュールについても説明します。
リモコン回路はどのように機能しますか?
このプロジェクトでは、リモコン車を作る際にモーターといくつかのIcをシャーシに固定します。
制御信号を送信するために無線周波数を取得し、車内の受信機モジュールに入力信号を受信させる必要があります。
(車のシャーシの例)。
さらに、リモコンには、データを制御し、車のモーターに電力を供給する二つのスイッチ、オン/オフスイッチがあります。
次に、デコーダ(HT12D)エンコーダ(HT12E)ペアとRFモジュールを使用して、送信前にリモコンのデータをエンコードし、データを受信してからモータドライバに送信する前に再度デコードすることができます。
オン/オフスイッチの組み合わせは、リモートコントロール車が取る方向を制御するのに役立ちます。 たとえば、両方のモーターがプロセスでオンにならないため、オン/オフスイッチがオフの場合、車は移動しません。 逆に、スイッチオンは、最終的に車をまっすぐに移動させるターンオンモーターに相当します。
最後に、リモコン車をオンにしたい場合は、車のターニングポイント側のモーターのみをオンにしてください。
(電子回路のスイッチ部)
ラジコン回路をどのように作っていますか?
まず、電源回路を考えてみましょう。 受信機回路とFR送信機回路は、両方とも異なる電源を必要とします。 つまり、送信機回路は9Vバッテリで動作しますが、12V電源で受信機回路に電力を供給するのに十分です。
RF送信機と受信機の回路の下に両方の回路を描画すると、必要な電源回路が表示されます。
は
- を交互にします他の回は、余分なLEDを追加するために1Kの抵抗を使用することができます。 それはまた電源の状態の示すことで助けます。
- さらに、IC7805を使用して、12V電源を5Vにレギュレーションするのに役立ちます。 急激な7Vの低下のために、レギュレータを燃やす可能性のある多くの熱生産を経験するため、ヒートシンクを使用することをお勧めします。
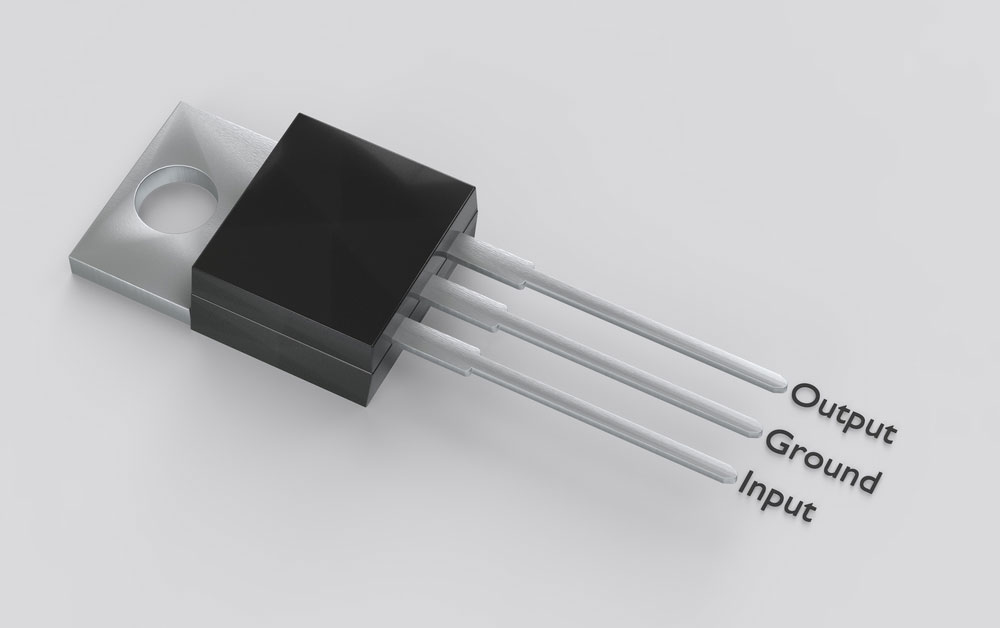
(IC7805ピン配置付きTO-220MOSFET)
- 最後になりましたが、470uFコンデンサと0.1uFコンデンサ、および1K抵抗を使用することで電源を改善することができます。
送信機回路を作る
あなたが必要とする材料は下記のものを含んでいます;
- Vero回路基板、
- 2ピン端子台、
- IC7805、
- プッシュ-トゥ–オン-スイッチ、
- セラミック-コンデンサ10kpf、
- 抵抗200オーム-470k、
- 18ピンicベース(オプション)、アンテナ用ワイヤ、
- led、
- 433mhz rf rx、txモジュール、
- ダイオード1n4007、
- 電解コンデンサ100Mfd、
- 16ピンdipスイッチ、
- マイクロプッシュボタンスイッチ、および
- ht12e。

(電源スイッチボタン)
施工手順
- まず、icピン1-8をdipスイッチに接続します。
- 次に、9番ピンをグラウンド、18番ピンを5V電源とします。
- 第三に、Txモジュールのデータピンをピン17に接続します。
- 最後に、以下の回路図を参照しながら、組み立てたすべての部品をVeroboardに挿入します。
トランスミッタ回路図
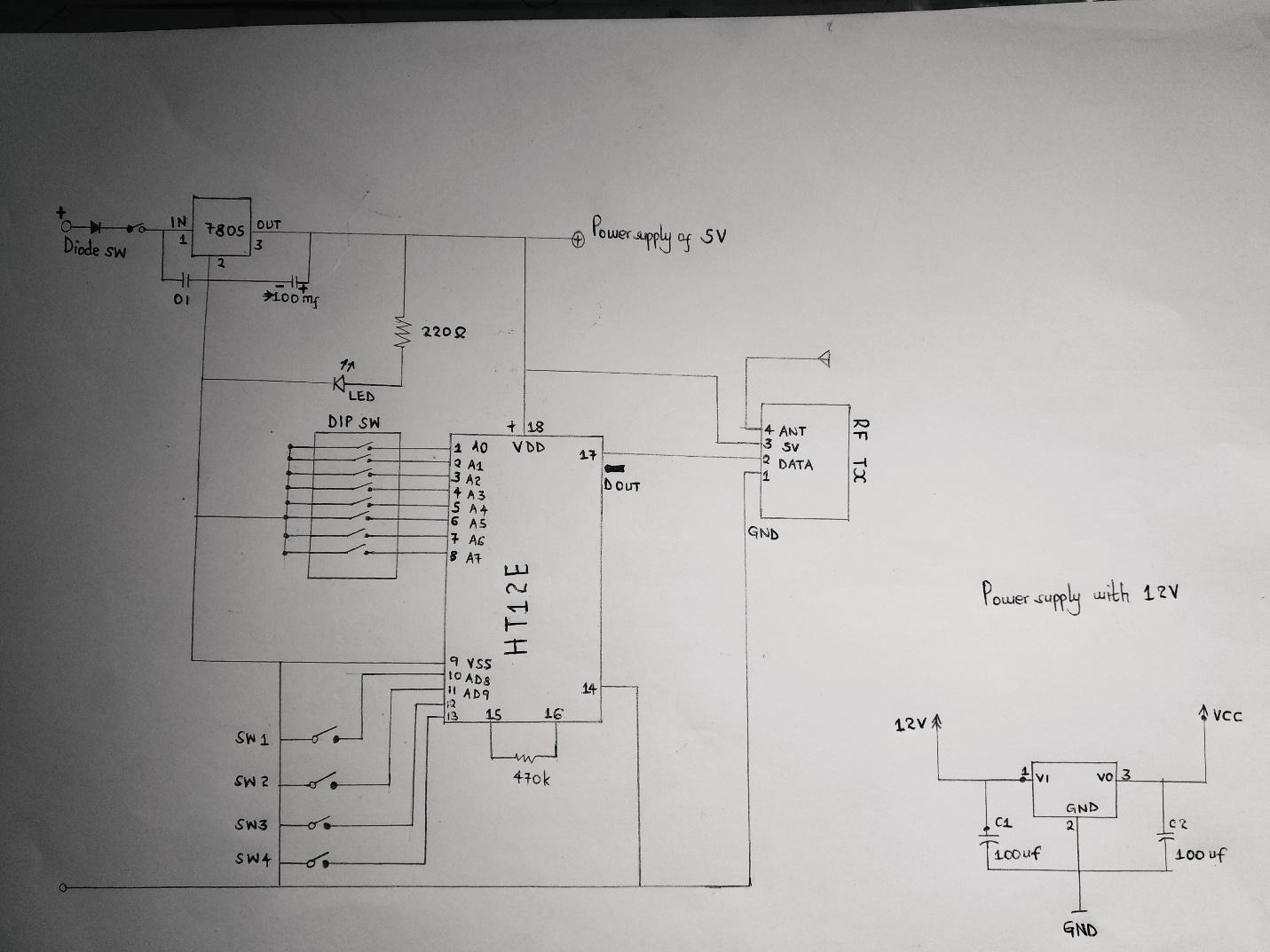
送信機回路図
受信機回路を作る
必要な材料/電子部品は次のとおりです;オンスイッチへのワンプッシュ、
(各種電子部品)
施工手順
- まず、icピンをdipスイッチに接続します。
- 次に5Vと9Vを18番ピンに接続します。
- その後、14ピンをrfレシーバモジュール(データピン)に接続します。
- 最後に、すべてのレシーバ部品を回路基板に挿入し、以下の回路図に従って接続します。
レシーバ回路図

メモ; 両方の回路には、テレスコピックアンテナなどのアンテナを使用します。 また、送信機はht12Eエンコーダを使用し、受信機はht12Dデコーダを使用していることに注意してください。
最も重要なのは、-veには黒の線を、+veには赤の線を使用することです。 問題が発生した場合には、色はあなたが速くそれを把握するのに役立ちます。

(テレスコピックアンテナ)。
適切なモーターを選択する
最良の自動車モーターを選択することは、多くの場合、使用する予定のロボット車のタイプによって異なります。 そして、大きな車の場合、重い負荷を運ぶので、12V DCモーターを使用することができます。 小さいものについては、6V Boモーターで十分です。
モーターに適したrpmを選択する
毎分回転数(RPM)は、DCモーターのシャフトが毎分完全に回転する回数を指します。 それは360°回転のスピンサイクルです。 プロジェクトのためのあなたのモーターを選んでいる間、それらが制御し易いので低いRPMのために解決しなさい。 このプロジェクトでは、12V300RPMを使用していますが、これは管理可能です。 また、トルクはモータ速度に反比例することを覚えておいてください。
(電気モーター)
RCカーのデバッグ
あなたのリモートコントロール車のデバッグは、回路内のいくつかの課題が発生した場合にのみ必要になります。
わかりやすくするために、回路の二つの異なる部分でデバッグを説明します。
電源で
多くの場合、短絡は電源の問題に寄与します。 電源の問題を修正するには、車の回路の電源を切ることから始めます。 次に、マルチメータを使用して、正と負のワイヤ間の接続を確認します。
エンコーダとデコーダICをデバッグする場合;
- まず、ht12Dの14番ピンをHT12Eの7番ピンに接続します。
- 次に、Ht12Dの10、11、12、13番ピンに4つのLedを接続します。
- その後、スイッチを押してLedが動作するかどうかをテストします。 ただし、点灯しない場合は、RFモジュールを確認して交換してください。
(エンジニアがマザーボードを検出)
それだ! 私達は首尾よく私達のリモート-コントロール車をセットアップしました。 私達は勤勉に上記の指針に続ければ、そこにあなたがDIYを完全に時間通りに終らせてもらうチャンスです保証します。 しかし、いくつかの概念がまだ不明な場合は、私たちに連絡し、私たちはあなたのサービスにいます。